Research
I am broadly interested in building AI agents with strong reasoning, planning and learning capabilities to physically interact with both simulated and real world.
News
[Feb 2, 2025] BiM-PPO is accepted to IEEE TVT.
[Jan 9, 2025] LearningFlow is released.
[Dec 5, 2024] CALMM-Drive is released.
[Jun 30, 2024] RD-PPO is accepted to IROS 2024.
[Mar 01, 2024] Latent-MPC is released.
[Jan 29, 2024] MPC-CRL is accepted to ICRA 2024.
Your browser does not support the video tag.
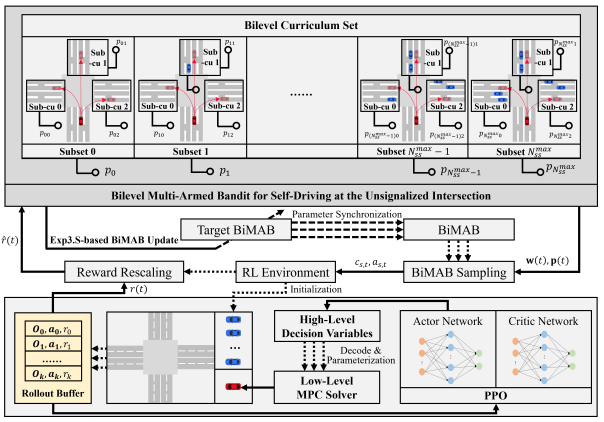
Bilevel Multi-Armed Bandit-Based Hierarchical Reinforcement Learning for Interaction-Aware Self-Driving at Unsignalized Intersections
Yubin Wang , Lei Zheng, Jun Ma
IEEE Transactions on Vehicular Technology, 2025 .
preprint
Your browser does not support the video tag.
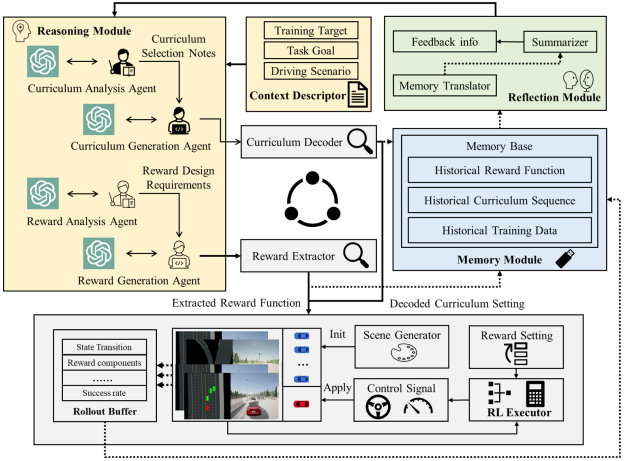
LearningFlow: Automated Policy Learning Workflow for Urban Driving with Large Language Models
Yubin Wang , Xu Han, Lei Zheng, Jun Ma
arXiv, 2025 .
preprint
Your browser does not support the video tag.
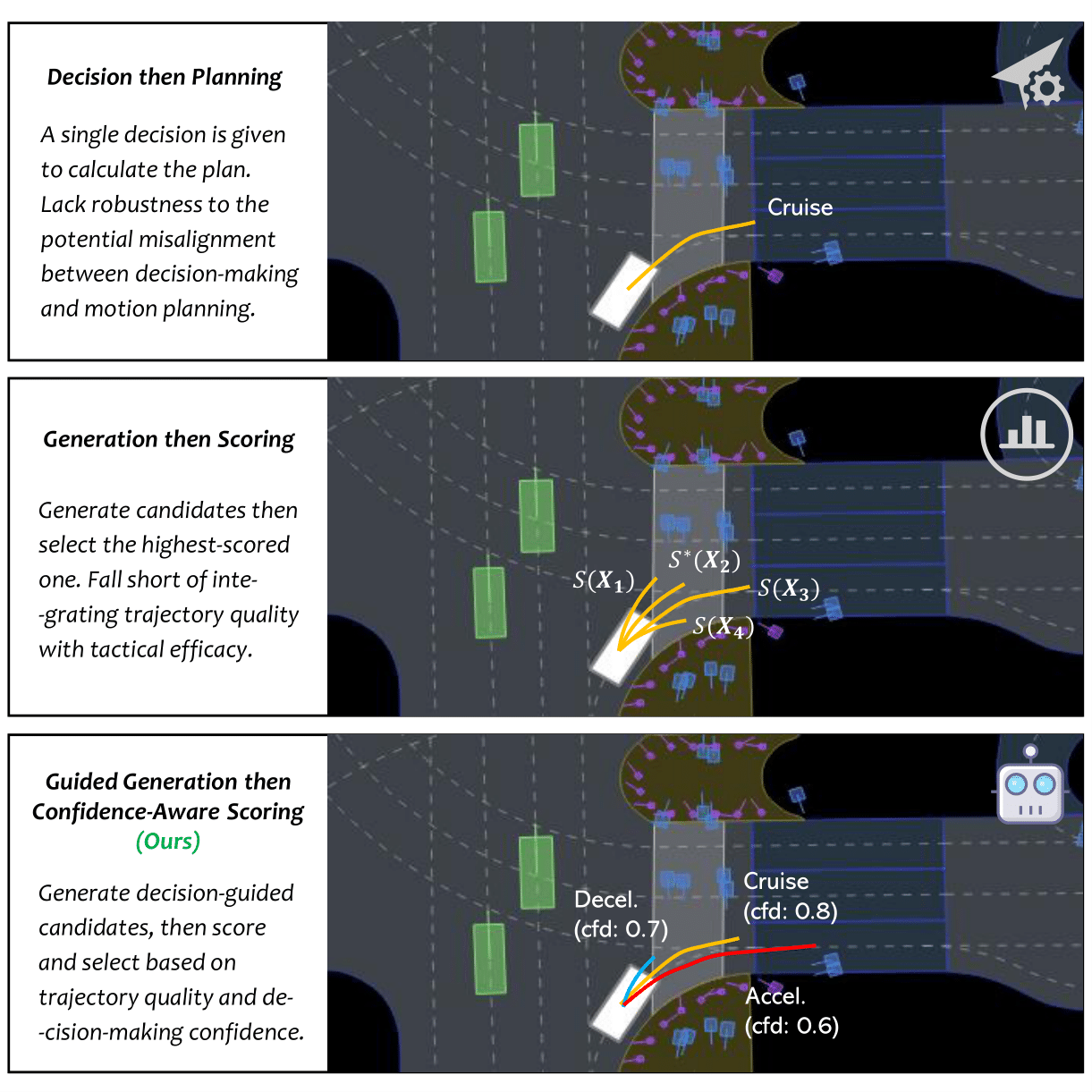
CALMM-Drive: Confidence-Aware Autonomous Driving with Large Multimodal Model
Yubin Wang , Haichao Liu, Rui Yang, Zengqi Peng, Lei Zhu, Jun Ma
arXiv, 2024 .
preprint
Your browser does not support the video tag.
Reward-Driven Automated Curriculum Learning for Interaction-Aware Self-Driving at Unsignalized Intersections
Yubin Wang , Jun Ma
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
pdf
Your browser does not support the video tag.
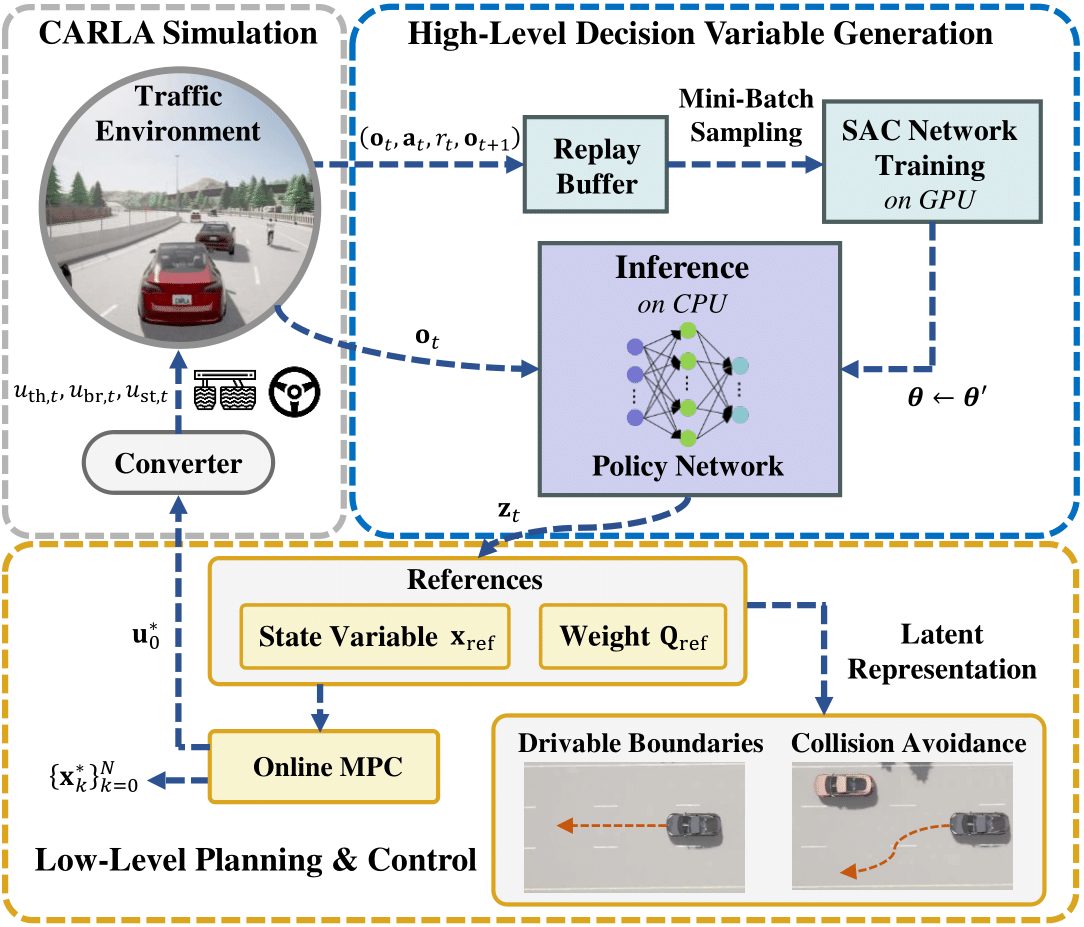
Learning the References of Online Model Predictive Control for Urban Self-Driving
Yubin Wang , Zengqi Peng, Yusen Xie, Yulin Li, Hakim Ghazzai, Jun Ma
arxiv, 2024 .
project page
/
preprint
/
code
Your browser does not support the video tag.
Chance-Aware Lane Change with High-Level Model Predictive Control through Curriculum Reinforcement Learning
Yubin Wang , Yulin Li, Zengqi Peng, Hakim Ghazzai, Jun Ma
IEEE International Conference on Robotics and Automation (ICRA), 2024
pdf
Your browser does not support the video tag.
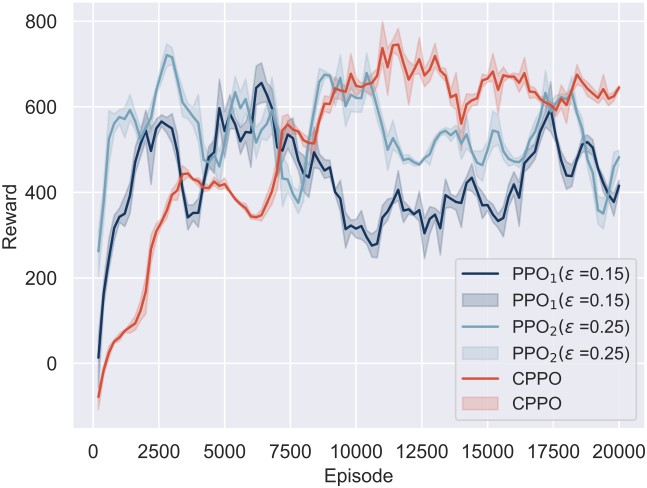
Curriculum Proximal Policy Optimization with Stage-Decaying Clipping for Self-Driving at Unsignalized Intersections
Yubin Wang , Lei Zheng, Ming Liu, Jun Ma
IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), 2023 .
pdf
Your browser does not support the video tag.
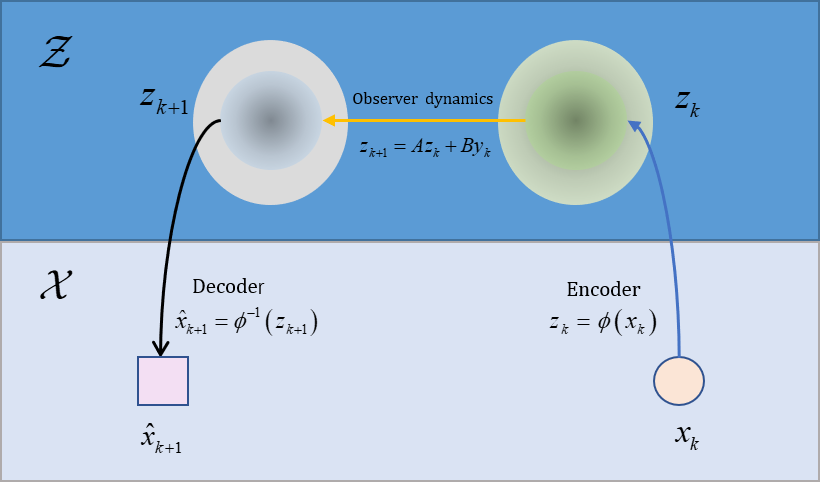
A Deep-Learning-Based Observer for State Estimation of Direct Contact Membrane Distillation System Modeled by Differential Algebraic Equations
Yubin Wang , Yasmine Marani, Taous Meriem Laleg Kirati
IEEE Conference on Control Technology and Applications (CCTA), 2022 .
pdf
-->