Publications
2024
- arXiv
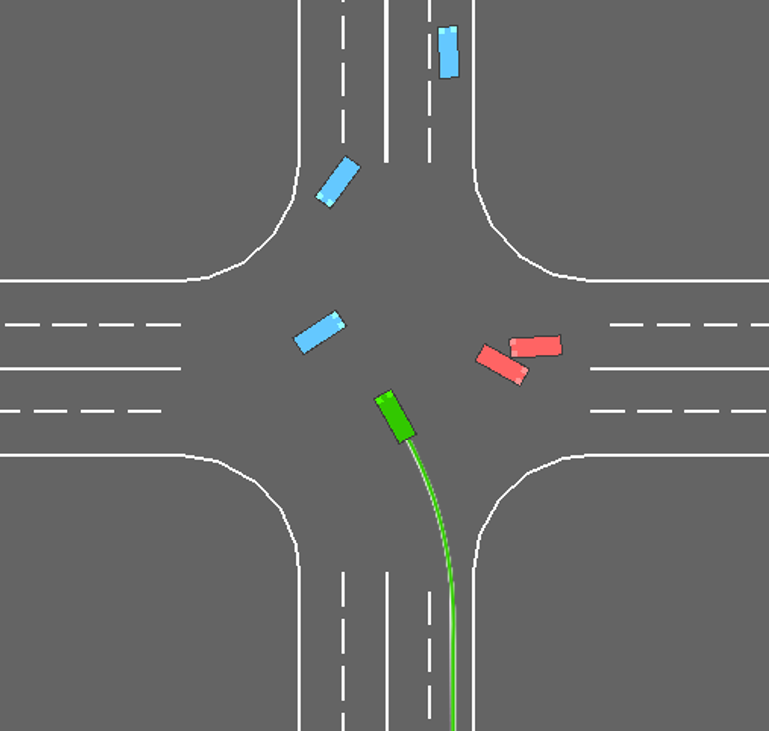
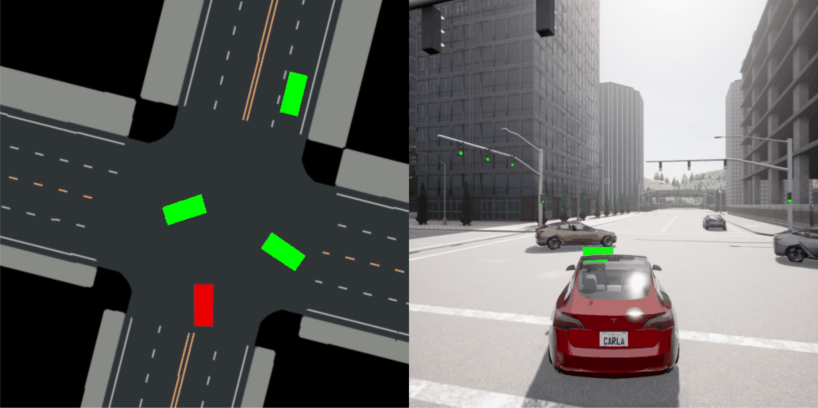 Bilevel Multi-Armed Bandit-Based Hierarchical Reinforcement Learning for Interaction-Aware Self-Driving at Unsignalized IntersectionsPreprint, 2024
Bilevel Multi-Armed Bandit-Based Hierarchical Reinforcement Learning for Interaction-Aware Self-Driving at Unsignalized IntersectionsPreprint, 2024
2023
2022
- APCCAS
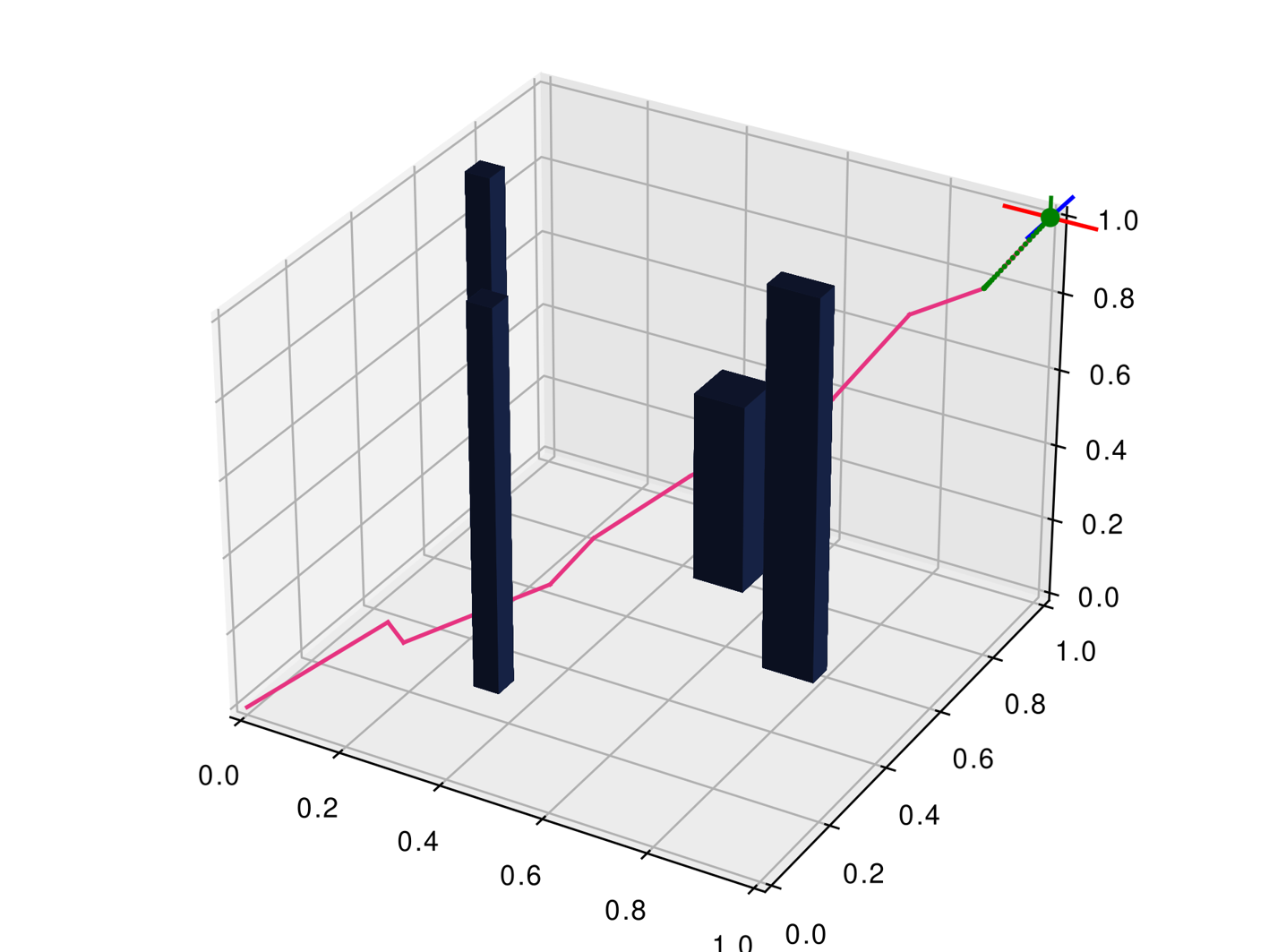 3D Autonomous Navigation of UAVs: An Energy-Efficient and Collision-Free Deep Reinforcement Learning ApproachIEEE Asia Pacific Conference on Circuits and Systems (APCCAS), 2022
3D Autonomous Navigation of UAVs: An Energy-Efficient and Collision-Free Deep Reinforcement Learning ApproachIEEE Asia Pacific Conference on Circuits and Systems (APCCAS), 2022 - CCTA
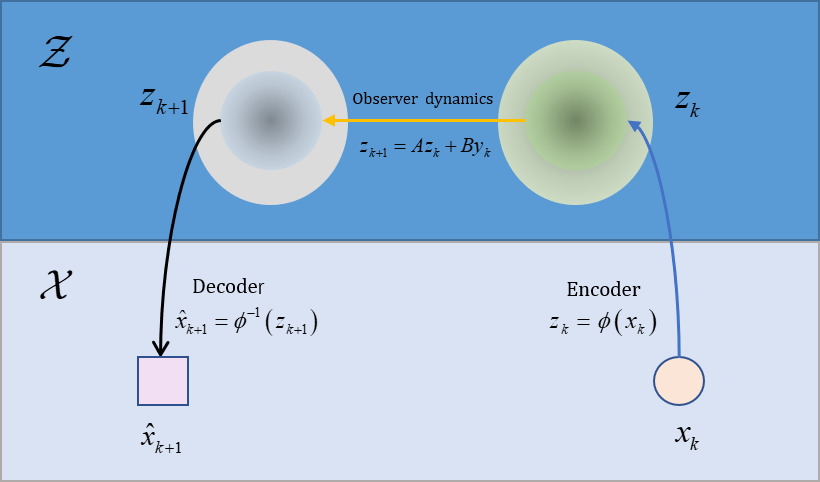 A Deep-Learning-Based Observer for State Estimation of Direct Contact Membrane Distillation System Modeled by Differential Algebraic EquationsIEEE Conference on Control Technology and Applications (CCTA), 2022
A Deep-Learning-Based Observer for State Estimation of Direct Contact Membrane Distillation System Modeled by Differential Algebraic EquationsIEEE Conference on Control Technology and Applications (CCTA), 2022